Testbed Description
Iris is a software radio architecture that has been developed by CTVR, The Telecommunications Research Centre at TCD, Written in C++, Iris is used for constructing complex radio structures and highly reconfigurable radio networks. Its primary research application is to enable a wide range of dynamic spectrum access and cognitive radio experiments. It is a GPP-based radio architecture and uses XML documents to describe the radio structure. This testbed provides a highly flexible architecture for real-time radio reconfigurability based on intelligent observations the radio makes about its surroundings.
Each radio is constructed from fundamental building blocks called components. Each component makes up a single process or calculation that is to be carried out by the radio. For instance, a component might perform the modulation on the signal or scale the signal by a certain amount. Each component supports one or more data types and passes datasets to other components, along with some metadata such as a time stamp and sample rate. There is a data buffer between each component to ensure the data is safe, even if one component is processing data much faster than another.
All components within the radio exist inside an engine. An engine is the environment in which one or more component operates. Each engine defines its own data-flow and reconfiguration mechanisms and runs one or more of its own threads. As with components, each engine is linked by a data buffer. Iris currently features two data types, the PN Engine and the Stack Engine. The PN engine is typically used for PHY layer implementations and is designed for maximum flexibility. It has a unidirectional data flow and runs one thread per engine. The Stack Engine is designed for the implementation of the network stack architecture, where each component is a layer within the stack and runs its own thread of execution. It also has a bidirectional data flow.
Iris’s capability to reconfigure the radio on the fly lies in the controllers. A controller exists independently of any engine and runs in its own thread of execution. A controller subscribes to events within components and reconfigures parameters in other components based on the observation of these events. For instance, a controller could be set up to observe the number of packets passing through a certain component and, upon reaching a certain number of packets, change the operating frequency of the radio.
The Iris 2.0 architecture is illustrated in the following figure.
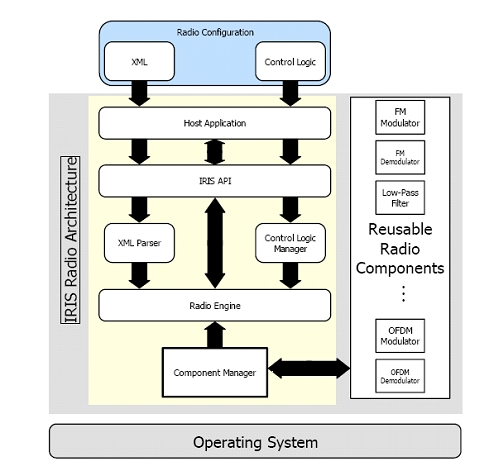
A radio is constructed and configured using XML documents. Each component is named and has its inputs, outputs and exposed parameters explicitly specified. Engines are declared and components are placed in their relevant engines. Controllers are then declared at the top of the XML document and the links between each component are declared at the end of the document.
The layout of the testbed hardware can be found here .
The testbed can be accessed directly here .